






Anche in Oftalmologia il futuro vedrà un impiego sempre più ampio di macchinari robotizzati, soprattutto in ambito chirurgico.

Le ultime notizie annunciano l’impiego dei robot anche nella chirurgia della cataratta, che è la procedura di chirurgica oculare più frequente a livello mondiale. La novità è costituita da un prototipo che utilizza un braccio robotico guidato da una videocamera 3D e che sta riportando risultati davvero promettenti negli studi iniziali di fattibilità.
Robot in oftalmologia
Per anni i robot ci hanno affascinato e spaventato nello stesso tempo, perché ammiriamo la loro precisione, ma abbiamo timore di sistemi guidati 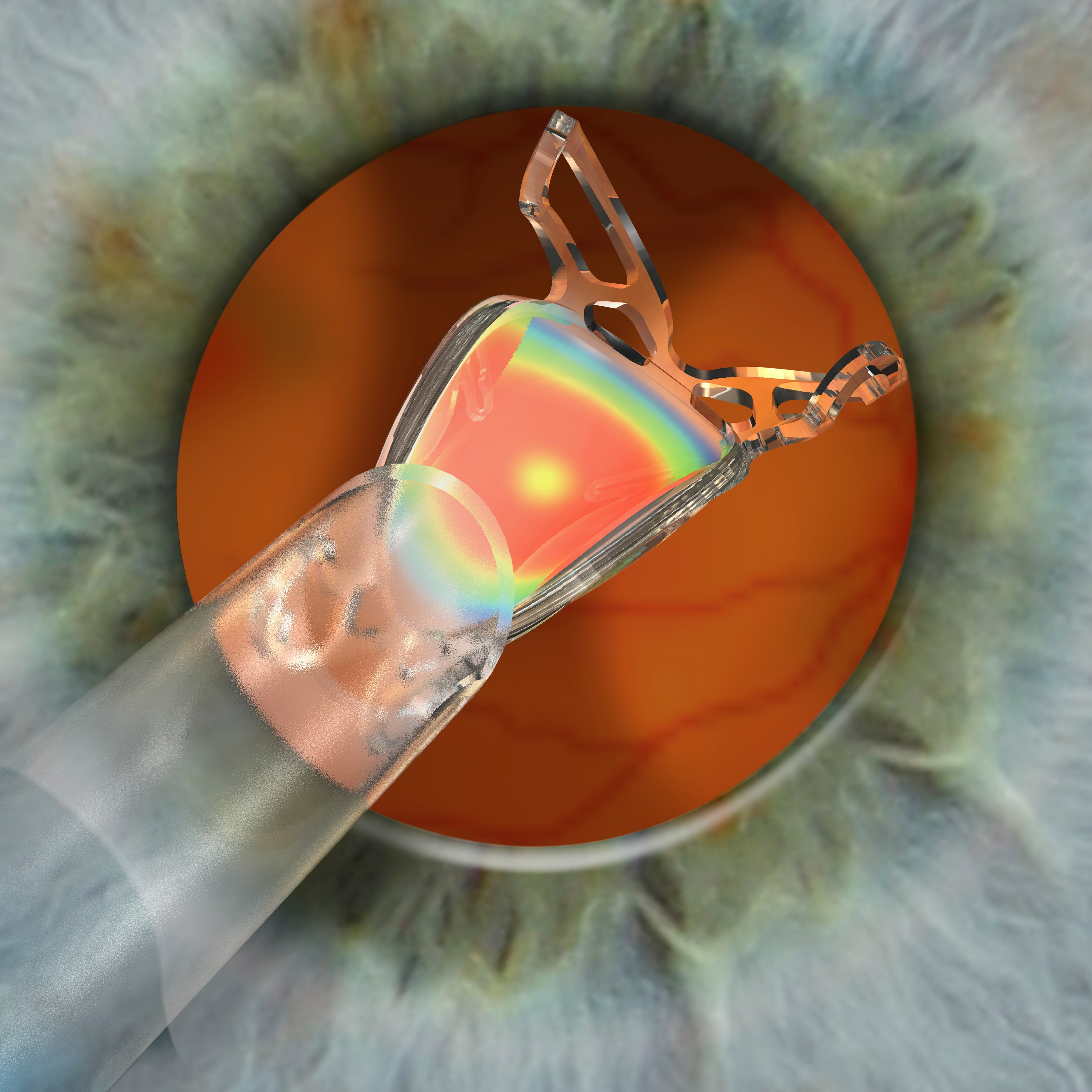 unicamente da algoritmi matematici. Queste paure sono particolarmente accentuate in medicina, un ambito in cui si gestiscono persone in condizione di vulnerabilità. Tuttavia, proprio la chirurgia costituisce un terreno ottimale per l’impiego dei robot, perché il robot non ha solo due mani, non trema, non si stanca, può operare attraverso incisioni piccolissime e consente interventi perfettamente riproducibili. Queste caratteristiche consentono interventi di chirurgia robotica in aree che non sarebbero altrimenti accessibili.
unicamente da algoritmi matematici. Queste paure sono particolarmente accentuate in medicina, un ambito in cui si gestiscono persone in condizione di vulnerabilità. Tuttavia, proprio la chirurgia costituisce un terreno ottimale per l’impiego dei robot, perché il robot non ha solo due mani, non trema, non si stanca, può operare attraverso incisioni piccolissime e consente interventi perfettamente riproducibili. Queste caratteristiche consentono interventi di chirurgia robotica in aree che non sarebbero altrimenti accessibili.
Il primo robot ad entrare in sala operatoria è stato, nel 2000, il sistema Da Vinci e da allora siamo arrivati ai 5.000 sistemi attuali a livello mondiale. Gli ambiti principali d’impiego sono la chirurgia del tumore prostatico e gli interventi ortopedici ad anca e ginocchio.
Se ci concentriamo sull’oftalmologia, molti chirurghi in realtà fanno già uso di robot, come nel caso della chirurgia della cataratta con laser a femtosecondi. Il laser a femtosecondi è un robot che opera in base ad una sequenza programmata in precedenza: incide frontalmente la capsula con un cerchio perfetto, riduce in frammenti il nucleo del cristallino, effettua delle incisioni stromali arcuate per la correzione dell’astigmatismo e prepara incisioni che si chiudono da sole sul tunnel corneale in ogni posizione e configurazione.
Nell’ambito della chirurgia retinica, per la quale è essenziale eliminare o ridurre i micro-tremori della mano e operare in spazi davvero minimi, viene impiegato il Preceyes system. Questo sistema viene guidato dalla mano del chirurgo come nella catena di trasmissione di un’auto: se il chirurgo muove la mano di 1-2 cm il robot effettuerà un movimento di soli 0,5 – 1 mm. In questo modo è possibile effettuare un’iniezione in una vena retinica o dissecare le membrane epiteliali con una precisione che senza il robot non sarebbe possibile.
Cataratta e sistemi robotizzati in 3D
Per l’intervento di cataratta il fattore cruciale per una chirurgia robotizzata di successo è la precisione nel tracciare e posizionare il braccio robotico e a questo scopo il nuovo sistema 3D utilizza un sistema di stereo-tracking in tempo reale che segue simultaneamente sia l’occhio che lo strumento. Per mantenere un design essenziale, il prototipo è stato realizzato includendo un braccio robotico industriale, adattato con un attacco speciale per il montaggio degli strumenti. Al posto del laser esterno, il sistema robotizzato è equipaggiato con uno strumento elettrico ad alta frequenza per la capsulotomia. Una stereo-camera effettua tracking ed imaging, al posto del microscopio operatorio. Oltre che monitorare la posizione e la rotazione dell’occhio, il sistema di tracciamento può acquisire dei dati, che consentono di compensare i cambiamenti indotti chirurgicamente, come la deformazione dell’occhio risultante dall’introduzione degli strumenti.
Le performance di questo prototipo sono state finora valutate con modelli meccanici di occhi per la guida strumentale, occhi artificiali fotorealistici per calibrare il tracking e occhi di maiale per testare la performance complessiva del sistema nel portare a termine gli atti chirurgici. Finora il sistema è stato utilizzato per incisioni corneali e capsulotomie ed ha dimostrato di operare con sufficiente precisione, fluidità di movimento e velocità. La telecamera 3D è stata in grado di triangolare un punto con un’accuratezza di ±0,05 mm e lo stesso livello di precisione è stato raggiunto nel posizionamento degli strumenti. Con questa tipologia di performance il robot risulta potenzialmente in grado di guidare gli strumenti all’interno della camera anteriore attraverso una piccola apertura nel limbus, come punto di accesso e pivot. Il confronto con la registrazione di interventi realizzati da chirurghi umani dimostra che il braccio robotico si muove con velocità e fluidità simile a quella umana.
Sviluppi in progress
Il prototipo testato attualmente monta un supporto singolo “fast-swap”, che richiede che il braccio robotico venga estratto dall’occhio per la sostituzione manuale o robotizzata dello strumentario operatorio. Un’alternativa in fase di sviluppo prevede un supporto con un “revolver-style” changer automatico adattato per molteplici strumenti chirurgici.